GPU计算的原理介绍
| 1. GPU计算的优势 复杂的人工智能算法训练与计算经常涉及上亿的参数,这些参数的计算需要大量的计算能力,目前在深度学习领域,GPU计算已经成为主流,使用GPU运算的优势如下: 目前,主流的GPU具有强大的计算能力和内存带宽,如下图所示,无论性能还是内存带宽,均远大于同代的CPU。 同时,GPU的thousands of cores的并行计算能力也是一大优势。 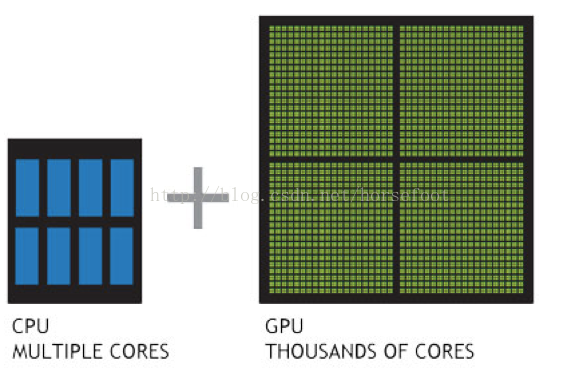 理解 GPU 和 CPU 之间区别的一种简单方式是比较它们如何处理任务。CPU 由专为顺序串行处理而优化的几个核心组成,而 GPU 则拥有一个由数以千计的更小、更高效的核心(专为同时处理多重任务而设计)组成的大规模并行计算架构。同时CPU相当的一部分时间在执行外设的中断、进程的切换等任务,而GPU有更多的时间并行计算。 2. GPU计算的原理 那么,CPU与GPU如何协同工作?下图展示了CPU与GPU的并存体系模式。
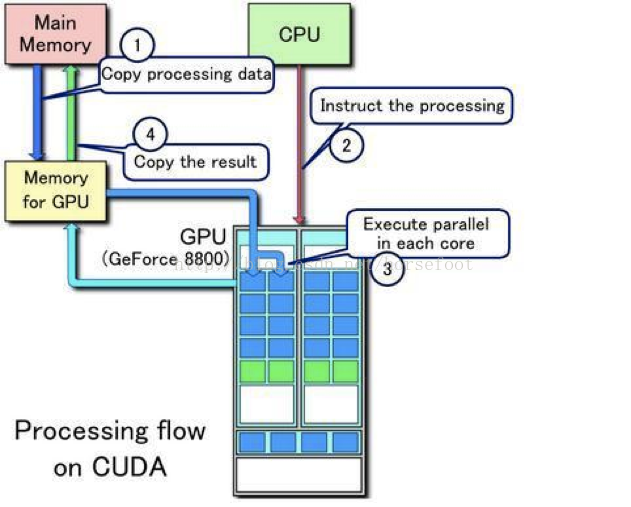
在需要GPU进行运算时,以NVIDIA推出的CUDA(Compute Unified Device Architecture)为例,整体的原理如下:
整体分为4步:
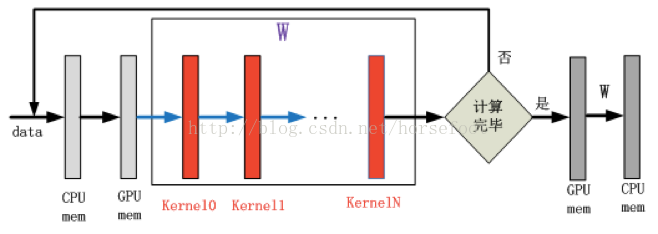
CUDA提供了对于一般性通用需求的大规模并发编程模型,使用户可以对NVIDIA GPU方便的对于 GPU进行并发性编程。如果进行编译优化会在特定操作系统里面把计算并行化分配到GPU的多个core里面,由于GPU有多个core(上千个),所以并发度大大提高,运算效率会比CPU高。下面用代码表明了如何通过GPU进行计算: 有三个数组int a[10], b[10], c[10];我们要计算a和b的向量之和存放到c中。 一般C语言: [mw_shl_code=bash,true]for(int i=0; i<10; i++) CUDA编程做法: GPU中的每个线程(核)有一个独立序号叫index,那么只要序号从0到9的线程执行c[index] = a[index] + b[index];就可以实现以上的for循环。以下为代码示例: [mw_shl_code=bash,true]#include 3. GPU并行计算的原理 由于每台服务器有多个CPU,多个GPU,同时为了进一步提高并行机器学习效率,我们的目标是为了多台服务器(每台服务器包含多块GPU卡)采取分布式计算的形式进行,那么要完成目标,在硬件层面需要进行服务器集群的构建,同时需要在深度学习框架层面也支持分布式,下面介绍GPU计算的分布式原理,深度学习分布式原理在下一个章节介绍。 首先简单介绍下单主机内GPU并行计算的基本原理: 单GPU并行计算:
针对每次训练数据,模型内计算通过多次GPU 内核的调用完成计算。权重W值一直存在GPU内存中,直到所有训练数据计算完毕之后回传到系统内存中。多GPU并行计算之数据并行:
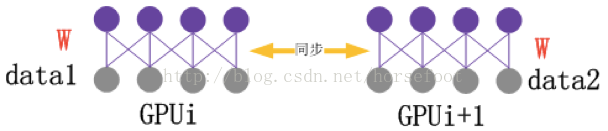
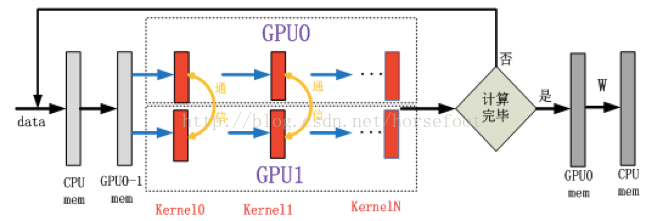
数据并行是指不同的GPU计算不同的训练数据,即把训练数据划分给不同的GPU进行分别计算,由于训练是逐步训练的,后一个训练数据的计算需要前一个训练数据更新的W(W通常是指模型训练变化了的数据),数据并行改变了这个计算顺序,多GPU计算需要进行W的互相通信,满足训练的特点,使训练可以收敛。数据并行如上图所示,多GPU训练不同的数据,每训练一次需要同步W,使得后面的训练始终为最新的W。该模型的缺点是当模型较大时,GPU内存无法满足存储要求,无法完成计算。 多GPU并行计算之模型并行:模型并行是指多个GPU同时计算同一个训练数据,多个GPU对模型内的数据进行划分,在一次训练数据多层计算过程中,每个GPU内核计算之后需要互相交换数据才能进行下一次的计算。 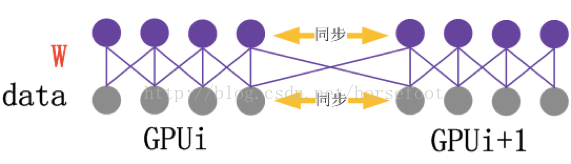
GPU集群并行模式即为多GPU并行中各种并行模式的扩展,如上图所示。节点间采用InfiniBand通信,节点间的GPU通过RMDA通信,节点内多GPU之间采用基于infiniband的通信。 |